
sur des sujets sur lesquels le cursus de formation officiel n’insiste pas.
1 La réserve finale définie par l’AMC1 NCO.OP.125(b) est de 10 minutes à 1500 ft AAL à la puissance maximale continue pour un vol local restant en permanence en vue de l’aérodrome, ou de 30 minutes à la vitesse d’attente si ce n’est pas un vol local, ou si l’aérodrome n’est pas maintenu en permanence en vue.
Le manuel de vol du Vélis indique des valeurs de consommation en fonction de la charge de la batterie bien entendu (0% à 100%), mais aussi de l’état de santé de la batterie, appelé SOH (State Of Health), qui varie de 100% à 0%. L’état de santé de la batterie diminue en fonction de la vie de la batterie. La batterie atteint, selon mes informations, son potentiel de 500h avant d’atteindre 0% de SOH.
Attention: le manuel de vol, par exemple 5-19, propose une réserve de 10mn à 20kW, inférieure au minimum prévu par la réglementation qui dit que la réserve doit être calculée à la puissance maximum continue, soit 35kW pour le Vélis. Le manuel indique aussi qu’il faut prévoir au minimum 30% de SOC à l’atterrissage, alors qu’il faut en réalité prévoir plus si le SOH n’est pas supérieur à 80%, si on veut rester dans les limites de la réglementation.
Exemples (cf page 5-20 du manuel de vol, page que je vous suggère d’imprimer et de garder sous la main)
Pour un vol de navigation ou un vol local au cours duquel vous ne gardez pas l’aérodrome en vue, sous l’hypothèse d’un SOH de 60%
Décollage et montée à 300ft AAL 5%
Montée complémentaire à 1300ft AAL 8% (à 75 KIAS et 48kW)
Vol économique 16 mn 30% (à 71 KIAS et 20 kW)
Réserve finale 30 mn 57% (à 71 KIAS et 20kW)
Total 100%
Pour un vol local en vue de l’aérodrome, toujours sous l’hypothèse d’un SOH de 60%
Décollage et montée à 300ft AAL 5%
Montée complémentaire à 1300ft AAL 8% (à 75 KIAS et 48kW)
Vol économique 26 mn 51% (à 71 KIAS et 20 kW)
Réserve finale 10 mn 36% (à 93 KIAS et 36kW)
Total 100%
2 Les exemples ci-dessus prévoient un atterrissage avec uniquement la réserve finale, ce qui veut dire qu’en cas de remise de gaz ou d’attente vous entamerez cette réserve, sauf si vous avez écourté votre vol suffisament.
Au retour dans le circuit il faut donc refaire un bilan carburant, ou plutôt un bilan énergie. Comme le tour de piste coute 12% à 60% de SOH (cf manuel 5-20), et que votre réserve finale est de 36%, si votre bilan énergie montre que vous serez posés avec moins de 48%, alors vous savez que vous entamerez votre réserve finale en cas de remise de gaz. Vous devez donc dans un tel cas annoncer Fuel Minimum au contrôleur (NCO.OP.185) dès votre bilan carburant fait, et, si vous devez remettre les gaz, vous devrez annoncer au contrôleur Mayday Mayday Mayday Fuel. (NCO.OP.185).
Le GM1 NCO.OP.185 apporte les précisions suivantes:
Ces annonces ne sont obligatoires que sur un aérodrome contrôlé, mais on peut envisager de les faire aussi sur un aérodrome avec un AFIS, ou même en auto-information. Vous pouvez aussi envisager d’annoncer votre autonomie résiduelle en cas d’annonce Fuel Minimum ou Mayday Fuel dans la mesure où elle dépend du type de vol.
3 On remarque qu’un vol de 40mn n’est pas possible en respectant la réglementation, sauf si le SOH est proche de 100%, alors qu’un tel vol est obligatoire pour maintenir la variante SEP électrique en état de validité (cf. article 2 de la dérogation du 28 novembre 2022 fixant les règles à appliquer pour acquérir et maintenir les privilèges permettant de piloter un avion électrique).
4 L’autonomie est tellement faible qu’on adoptera en général la vitesse économique de 71KIAS. À cette vitesse, l’assiette est trop cabrée pour avoir une visibilité satisfaisante devant soi. Il faut penser à zigzaguer pour voir ce qui se passe devant, un très bon exercice pour bien maîtriser l’usage du palonnier qui est particulièrement délicat sur cet avion en raison de ses grandes ailes.
5 À la vitesse de vol économique de 69KCAS (71 KIAS), on est à 1.35 Vs (la vitesse de décrochage étant de 51KCAS (53 KIAS)), alors qu’on conseille en général d’adopter une vitesse de 1.45 Vs minimum pour pouvoir évoluer en sécurité. Un virage à 30% d’inclinaison parfaitement symétrique donne une marge faible d’environ 25% par rapport au décrochage. Si votre virage n’est pas parfaitement symétrique, la marge est encore plus faible. Soyez donc prudent et n’oubliez pas le réflexe en cas d’activation du vibreur de manche: pousser le manche en avant sans hésiter, et sans mouvement latéral du manche. Une fois le vibreur arrêté, alors vous pouvez agir latéralement sur le manche pour remettre les ailes à plat.
6 Pour planifier votre vol, nous n’avez pas d’autre choix que celui d’utiliser les chiffres du manuel de vol, mais une fois dans l’avion, vous pouvez utiliser diverses techniques pour économiser l’énergie :
– décoller sans volets (c’est autorisé, cf. Manuel 4-12) ;
– limiter la puissance à 50kW au décollage(puissance minimum permise au décollage, cf. Manuel 4-12) ;
– limiter la puissance à 35 kW en montée initiale (puissance minimum recommandée en montée initiale, cf. Manuel 3-21)
Mais bien évidemment, il faut vous assurer que la piste est assez longue, que la puissance que vous affichez est suffisante, en fonction des circonstances, pour vous affranchir des obstacles avec une marge de sécurité suffisante.
7 L’utilisation des volets :
– Pensez à demander à votre passager à ne rien mettre dans sa poche gauche, pour pouvoir accéder facilement à la commande de volets ;
– Le manuel dit qu’il est difficile de tenir la vitesse en approche avec les volets en position 0, il recommande donc l’atterrissage plein volets (4-19). Pourquoi ?
En fin de vol, le choix économique en énergie est de sortir les volets le plus tard possible et de réduire la vitesse sous 71 KIAS le plus tard possible.
Cependant.
Si vous êtes à 71KIAS sur un plan à 3°, votre taux de chute sera d’environ 350ft/m. La finesse moteur coupée est de 15 (cf. Manuel 3-19) soit environ 450 ft/mn à 71KIAS. Ce qui veut dire que si vous subissez une petite ascendance, ou si vous vous trouvez à une hauteur un peu trop haute qu’il vous faut corriger par un taux de chute supérieur à 450ft/mn, une fois que vous aurez tout réduit, votre vitesse augmentera au delà de 71KIAS.
La méthode de sortie des volets le plus tard possible augmente donc le risque de non stabilisation en finale, et donc le risque d’avoir à refaire un tour de piste, alors qu’en général on est en limite d’autonomie. Je suggère donc de sortir les volets et de réduire la vitesse suffisamment tôt pour être bien stabilisé à 60kt en finale avec les volets en position 2.
La plage de vitesse autorisée avec les volets en position atterrissage est très réduite: 60kt-65kt, c’est une raison supplémentaire pour stabiliser la vitesse en approche assez tôt.
8 Une limitation inhabituelle figure au manuel de vol (2-15): le vol est interdit par forte pluie. Il semble que cette limitation ne figure pas sur les manuels des versions à essence, je pense donc qu’il s’agit d’une limitation due au fait que l’eau et l’électricité ne font pas bon ménage.
9 Replanification: bien que la partie NCO me semble muette sur ce point, je ne vois rien qui s’oppose à replanifier. Par exemple, dans le cas d’un vol de navigation, que vous avez planifié avec 30 mn de réserve, ou d’un vol local hors la vue de l’aérodrome planifié également avec 30 mn de réserve, en fin de vol, dès que vous voyez votre aérodrome de destination, ou dès que vous voyez à nouveau votre aérodrome de départ, et pour autant que vous ne comptiez plus le perdre de vue, vous avez selon moi le droit de replanifier votre réserve et de la descendre à 10mn. Dans l’exemple d’un SOH à 60% que j’a pris depuis le débit, ça vous fait gagner 21%, donc un tour de piste (12%), voire un tour de piste suivi d’un tour de piste basse hauteur.
10 La réserve finale est définie dans un AMC, ce qui veut dire qu’on peut déposer un moyen alternatif de conformité proposant une réserve finale calculée autrement. Je pense que sur un aérodrome muni de deux pistes, sous certaines conditions d’expérience des pilotes, de météo, de planification, et de documentation de la consommation réelle d’énergie, on pourrait envisager une réserve plus petite que les 10 mn à puissance maximum continue si on reste en tour de piste, par exemple celle du manuel de vol de 10 minutes à 20kW, et aussi qu’on pourrait envisager, sur des itinéraires définis à l’avance qui quitteraient la vue de l’aérodrome, une réserve finale inférieure aux 30 mn de l’AMC.





 , où T est la température, et
, où T est la température, et  le nombre de moles du gaz, quotient du nombre de molécules composant notre gaz par le nombre d’Avogadro, que l’on peut écrire aussi
le nombre de moles du gaz, quotient du nombre de molécules composant notre gaz par le nombre d’Avogadro, que l’on peut écrire aussi ,
avec
,
avec  la constante de Boltzmann.
la constante de Boltzmann.



 pour un échange de chaleur isochore.
pour un échange de chaleur isochore.

 pour un échange de chaleur isochore, c’est la réponse à la question posée.
pour un échange de chaleur isochore, c’est la réponse à la question posée. .
. pour un processus isobare
pour un processus isobare , et enfin
, et enfin
 pour un processus isobare.
pour un processus isobare. pour un processus isobare, c’est la réponse à la question posée.
pour un processus isobare, c’est la réponse à la question posée.
 à volume constant et
à volume constant et  à pression constante.
à pression constante.  pour un gaz parfait
pour un gaz parfait
 pour un gaz parfait
pour un gaz parfait  pour un gaz diatomique,
pour un gaz diatomique,
 pour un gaz diatomique.
pour un gaz diatomique.
 à volume constant,
à volume constant,
 à pression constante.
à pression constante.
 .
.
 pour un processus adiabatique
pour un processus adiabatique
 pour un processus adiabatique
pour un processus adiabatique

 pour un processus adiabatique
pour un processus adiabatique
 .
.
 ou encore,
ou encore,
 γ constant au cours d’un processus adiabatique, relation connue sous le nom de loi de Laplace.
γ constant au cours d’un processus adiabatique, relation connue sous le nom de loi de Laplace.
 . Le temps pour parcourir la même distance s’il y a du vent de vitesse W, l’angle au vent étant comme à notre habitude noté θ, est
. Le temps pour parcourir la même distance s’il y a du vent de vitesse W, l’angle au vent étant comme à notre habitude noté θ, est  .
.



 .
.
 =0.5
=0.5 =0.9s.
=0.9s.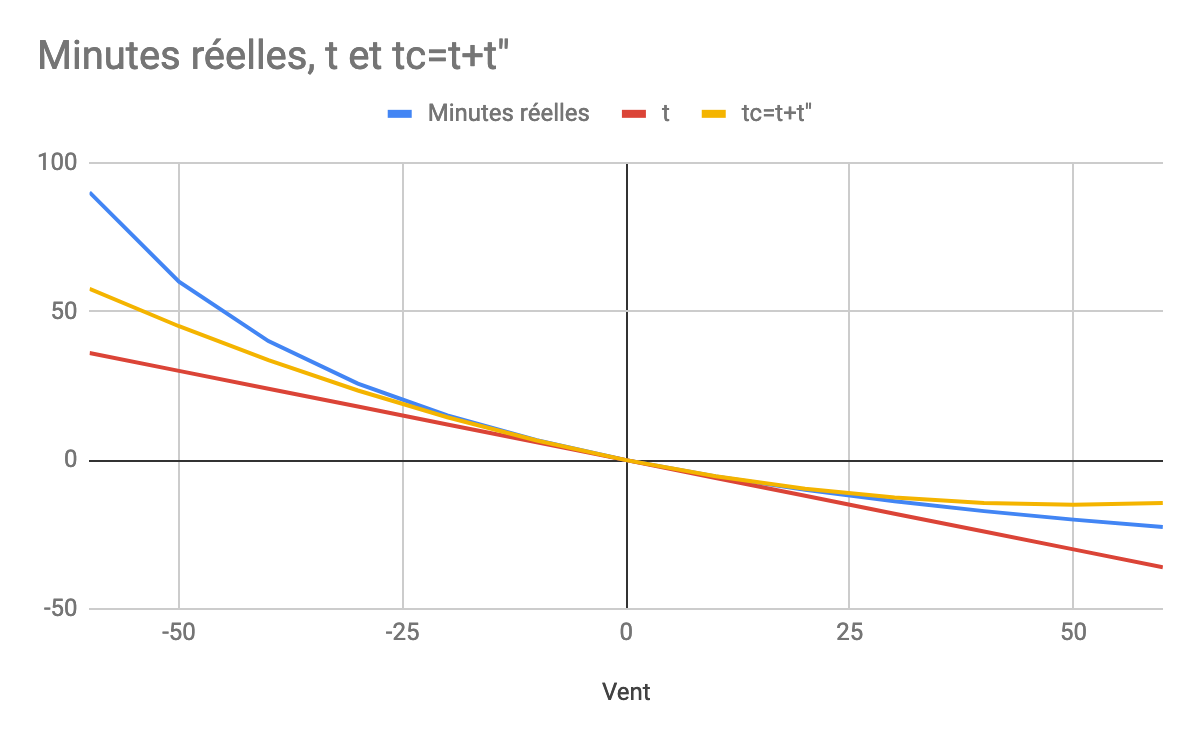


 =0.2
=0.2 =11.
=11. =55mn.
=55mn.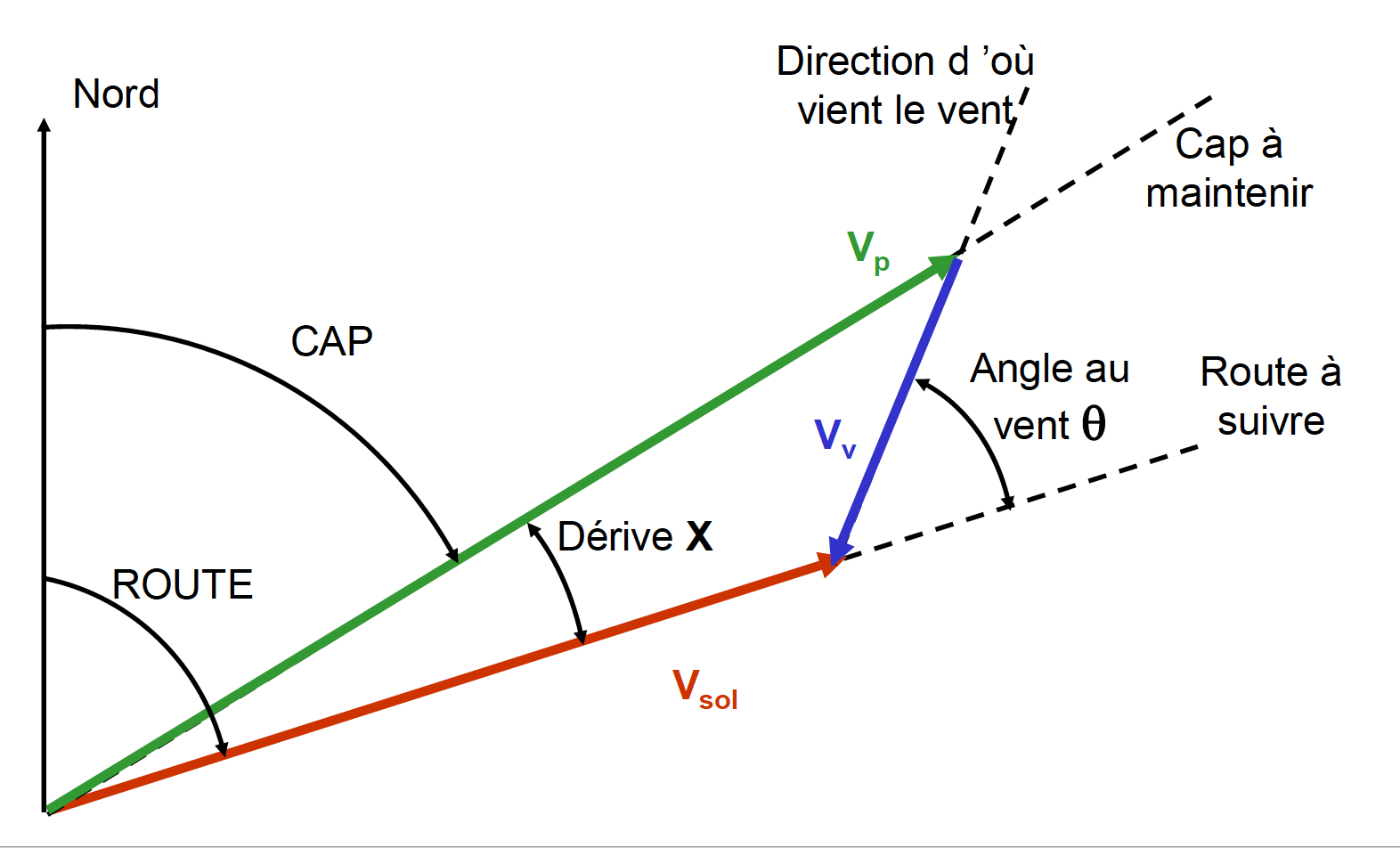


 .
. .
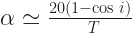
. , avec α exprimé en degrés, qui peut s’écrire aussi
, avec α exprimé en degrés, qui peut s’écrire aussi  , l’angle étant là aussi exprimé en degrés, qui consiste à approcher le sinus par sa corde à 30°. Cette formule approchée donne des valeurs exactes pour les angles 0° et 30°, est très précise entre 0° et 30°, et l’erreur devient significative pour des angles dont le sinus dépasse significativement ½. Si on approche le sinus par cette formule la formule (4) devient
, l’angle étant là aussi exprimé en degrés, qui consiste à approcher le sinus par sa corde à 30°. Cette formule approchée donne des valeurs exactes pour les angles 0° et 30°, est très précise entre 0° et 30°, et l’erreur devient significative pour des angles dont le sinus dépasse significativement ½. Si on approche le sinus par cette formule la formule (4) devient .
. . (5) peut donc s’écrire
. (5) peut donc s’écrire , d’où on tire
, d’où on tire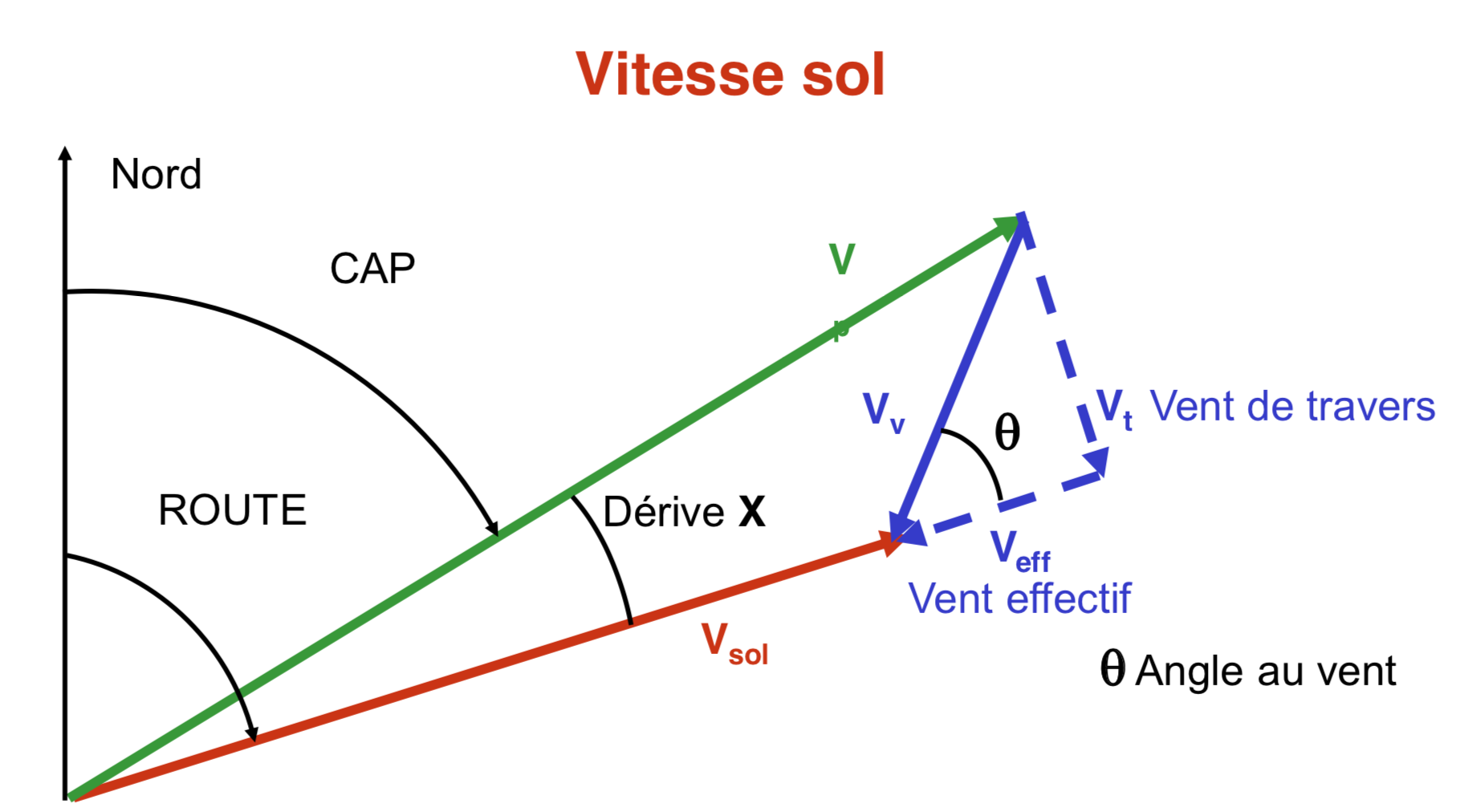
 , qui donne la vitesse sol en fonction de la force et direction du vent, et de la vitesse propre. Les manuels appellent vent effectif, que je noterai We=W.cosθ, la composante longitudinale du vent. On peut ainsi écrire (9) en fonction du vent effectif We
, qui donne la vitesse sol en fonction de la force et direction du vent, et de la vitesse propre. Les manuels appellent vent effectif, que je noterai We=W.cosθ, la composante longitudinale du vent. On peut ainsi écrire (9) en fonction du vent effectif We
 , ou encore
, ou encore .
. la proportion, en %, dont il faut diminuer le résultat de la formule (13) pour obtenir une valeur exacte.
la proportion, en %, dont il faut diminuer le résultat de la formule (13) pour obtenir une valeur exacte.
 .
.
 , ou encore
, ou encore  , on obtient alors
, on obtient alors
 est la durée T qu’on mettrait pour rejoindre la balise, et
est la durée T qu’on mettrait pour rejoindre la balise, et  est la durée t pour parcourir l’arc de cercle.
est la durée t pour parcourir l’arc de cercle. minutes
minutes . En remplaçant d par le produit de la durée T et de la vitesse v, et r par
. En remplaçant d par le produit de la durée T et de la vitesse v, et r par  , sa valeur trouvée dans un
, sa valeur trouvée dans un 
 , avec x exprimé en degrés, qui consiste à approcher le sinus par sa corde à 30°. Cette formule approchée donne des valeurs exactes pour les angles 0° et 30°, et des valeurs très précises entre 0° et 30°. Pour notre calcul, nous allons approcher le sinus par la formule
, avec x exprimé en degrés, qui consiste à approcher le sinus par sa corde à 30°. Cette formule approchée donne des valeurs exactes pour les angles 0° et 30°, et des valeurs très précises entre 0° et 30°. Pour notre calcul, nous allons approcher le sinus par la formule  , ou encore
, ou encore  , formule qui approche le sinus par sa corde à environ 42¼°. L’erreur ne dépasse 1½° qu’au delà d’un sinus de ¾, soit environ 50°. Dans la plupart des cas, l’angle d’anticipation sera très largement inférieur à 50°, dans la vie courante du pilote il dépasse rarement 10°, l’approximation est donc pleinement justifiée.
, formule qui approche le sinus par sa corde à environ 42¼°. L’erreur ne dépasse 1½° qu’au delà d’un sinus de ¾, soit environ 50°. Dans la plupart des cas, l’angle d’anticipation sera très largement inférieur à 50°, dans la vie courante du pilote il dépasse rarement 10°, l’approximation est donc pleinement justifiée.
 par sa corde entre les points 60° et 120°:
par sa corde entre les points 60° et 120°:  . Cette formule donne des valeurs exactes pour 60°, 90° et 120°. L’erreur de cette approximation ne dépasse pas ½° entre 60° et 120°. À 45° et 135° l’erreur est de 4°, mais l’approximation diverge fortement en deçà de 45° et au delà de 135°.
. Cette formule donne des valeurs exactes pour 60°, 90° et 120°. L’erreur de cette approximation ne dépasse pas ½° entre 60° et 120°. À 45° et 135° l’erreur est de 4°, mais l’approximation diverge fortement en deçà de 45° et au delà de 135°.

















 ,
,









 ), rayon pour lequel nous
), rayon pour lequel nous  . Notre approximation précédente donnait 0.50, celle d’aujourd’hui 0.60, la vraie valeur est proche de 0.53, nos deux approximations sont satisfaisantes pour l’usage que nous en ferons.
. Notre approximation précédente donnait 0.50, celle d’aujourd’hui 0.60, la vraie valeur est proche de 0.53, nos deux approximations sont satisfaisantes pour l’usage que nous en ferons.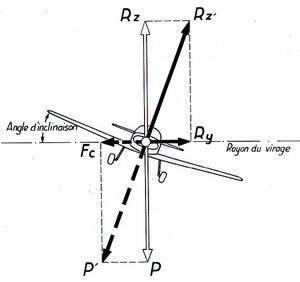
 , R étant le rayon de virage et V la vitesse propre, résultat dont vous trouverez la démonstration dans n’importe quel manuel traitant de cinématique.
, R étant le rayon de virage et V la vitesse propre, résultat dont vous trouverez la démonstration dans n’importe quel manuel traitant de cinématique.
 soit
soit 
 , soit 1NM pour 45° d’inclinaison.
, soit 1NM pour 45° d’inclinaison. , soit un rayon de 1.6 NM pour un virage à 250kt.
, soit un rayon de 1.6 NM pour un virage à 250kt. au lieu de
au lieu de  , et en approchant la parabole
, et en approchant la parabole 
 si l’avion vole à la vitesse propre V.
si l’avion vole à la vitesse propre V. trouvée au paragraphe relatif au rayon de virage, on trouve
trouvée au paragraphe relatif au rayon de virage, on trouve  = 1mn, soit
= 1mn, soit  .
.


 au lieu de
au lieu de  . C’est une approximation très commode pour le calcul mental. L’erreur due à cette approximation ne dépasse un vingtième de mille marin qu’au delà de 165kt et ne dépasse un dixième de mille marin qu’au delà de 330kt.
. C’est une approximation très commode pour le calcul mental. L’erreur due à cette approximation ne dépasse un vingtième de mille marin qu’au delà de 165kt et ne dépasse un dixième de mille marin qu’au delà de 330kt. , soit avec les données de l’exemple q=0.2 ou 20% ou
, soit avec les données de l’exemple q=0.2 ou 20% ou  .
. qu’on peut aussi écrire sous la forme
qu’on peut aussi écrire sous la forme , soit avec les données de l’exemple:
, soit avec les données de l’exemple: ou 25%, ou encore 15 minutes par heure. (J’ai détaillé pour aider ceux de mes lecteurs qui auraient oublié comment manipuler des fractions).
ou 25%, ou encore 15 minutes par heure. (J’ai détaillé pour aider ceux de mes lecteurs qui auraient oublié comment manipuler des fractions). ou 10 minutes par heure ou environ 17%.
ou 10 minutes par heure ou environ 17%.
 =10%
=10% ≈11%
≈11% ≈9%
≈9% =12½%
=12½% ≈14%
≈14% ≈17%
≈17% =25%
=25% ≈33%
≈33% =50%
=50% = 100%
= 100% soit 2½ minutes par heure ou environ 4%. Un trajet aller-retour de 100NM, soit 2 heures sans vent sera ainsi majoré 2 x 2½ = 5 minutes, on retrouve bien les 5 minutes de majoration du paragraphe précédent.
soit 2½ minutes par heure ou environ 4%. Un trajet aller-retour de 100NM, soit 2 heures sans vent sera ainsi majoré 2 x 2½ = 5 minutes, on retrouve bien les 5 minutes de majoration du paragraphe précédent.



 CQFD sauf erreur de ma part.
CQFD sauf erreur de ma part.