L’exploitation des avions qui ne sont pas employés pour du transport aérien ou pour des opérations spécialisées est régie
– par la part NCC du règlement (EU) 965/2012 relatif aux opérations aériennes pour les avions complexes1 ;
– par la part NCO du même règlement pour les autres avions. Par exception, l’exploitation des avions complexes à turbopropulseurs ayant une masse maximale certifiée au décollage inférieure ou égale à 5 700 kg est aussi régie par la part NCO.2
Dans la suite, nous désignerons par « complexe au sens des règles opérationnelles » un avion régit par la part NCC. Cet article synthétise les éléments utiles au pilote pour de telles exploitations. Comme c’est une synthèse, il n’est pas exhaustif. Je me suis limité au biréacteur léger de catégorie A ou B pour l’avion complexe, et à l’avion à piston pour l’avion non complexe. En part NCC l’exploitation doit être déclarée préalablement (ORO.DEC.100) et un manuel d’exploitation doit être mis à la disposition des équipages par l’exploitant (Article 8b de l’annexe V au Règlement (CE) n°2018/113). Les exploitants détenteurs d’un certificat de transport aérien qui souhaitent réaliser aussi des vols dits privés, c’est à dire hors champ d’application des règles du transport aérien commercial, doivent prévoir de tels vols dans leur manuel d’exploitation soumis à l’approbation de l’autorité (ORO.AOC.125), et sont en contrepartie dispensés de la déclaration prévue au ORO.DEC.100. Selon le guide établi par la DSAC (Exploitation à des fins non commerciales d’aéronefs figurant dans les OPS SPEC d’un détenteur de CTA), l’exploitant peut décider de conserver les règles du transport commercial (part CAT) ou les adapter, sans toutefois descendre en dessous des exigences minimales applicables aux vols non-commerciaux qui figurent dans les règlementations suivantes :(..) Partie NCC, NCO, (…).
Le manuel doit dans ce cas comporter une indication claire de toute différence existant entre les procédures opérationnelles utilisées dans le cadre d’une exploitation à des fins de transport aérien commercial et celles d’une exploitation à des fins non commerciales.(ORO.AOC.125).
Ainsi, pour les vols non-commerciaux, l’exploitant d’un avion complexe au sens des règles opérationnelles, qu’il soit ou non détenteur d’un CTA, doit se positionner pour la rédaction de son manuel d’exploitation entre les règles strictes de la part CAT, et les règles souples de la part NCC, laissant dans ce cas à l’équipage le soin de prendre les marges de sécurité supplémentaires qui s’imposent en fonction des circonstances.
Pour un avion non complexe au sens des règles opérationnelles non exploité par un détenteur de CTA, aucun manuel d’exploitation n’étant obligatoire, ce sera au pilote de veiller à prendre des marges par rapport à ce qu’impose la part NCO.
1.1 -En part NCC l’approche stabilisée est la règle, bien que de l’exception soit possible (AMC2 NCC.OP.110 (b)) ;
– en part NCO, je n’ai rien trouvé à ce sujet dans la réglementation, j’en conclus qu’une approche stabilisée n’est pas obligatoire.
1.2 La descente continue pour les approches sans guidage vertical est
– recommandée mais pas obligatoire en part NCO (GM2 NCO.OP.110)
alors que
– c’est le principe en part NCC (AMC2 NCC.OP.110 :(c) Whenever practical, non-precision approaches should be flown using CDFA technique. L’exception est possible: Different procedures may be used for a particular approach to a particular runway. (d) For approaches not flown using the CDFA technique: when calculating the minima (…) the applicable minimum runway visual range (RVR) should be increased by 200 m for Category A and B aeroplanes (…)provided the resulting RVR/converted meteorological visibility (CMV) value does not exceed 5 000 m.).
1.3 Pour la navigation PBN, on le droit d’utiliser une base de données qui n’a pas plus d’un cycle de retard aux conditions suivantes (AMC2 NCO.GEN.105 + AMC2 NCC.GEN.106): (1) the pilot-in-command has confirmed that the parts of the database which are intended to be used during the flight and any contingencies that are reasonable to expect are not changed in the current version;
(2) any NOTAMs associated with the navigational data are taken into account;
(3) maps and charts corresponding to those parts of the flight are current and have not been amended since the last cycle;
(4) any MEL limitations, where available, are observed; and
(5) the database has expired by no more than 28 days.
2 Carburant (NCO.OP.125 +NCC.OP.130): en plus du carburant nécessaire pour aller à destination puis au dégagement et d’avoir prévu tous les aléas possibles (dégagement, ATC, météo, etc.), il faut une marge de 45 minutes à l’altitude normale de croisière (thereafter to fly for at least 45 minutes at normal cruising altitude). Cette marge doit être encore dans les réservoirs à l’atterrissage (NCO.OP.185 + NCC.OP.205(b)).
NCC.OP.205 (a) impose à l’exploitant d’établir une procédure destinée à s’assurer que des bilans carburants sont faits en vols.
Annoncer Minimum Fuel si les deux conditions suivantes sont réunies:
-vous n’avez plus assez de carburant pour dégager sur un autre aérodrome;
-un délai supplémentaire entamera la marge ultime de 45 minutes.
Annoncer Mayday, mayday, mayday, fuel dès que les calculs indiquent que la quantité de carburant utilisable présente dans les réservoirs à l’atterrissage sur l’aérodrome le plus proche où un atterrissage en sécurité peut être effectué est inférieure à 45 minutes.
(Doc 4444 OACI, SERA.11012, et consultez l’info sécurité DGAC)
Notez qu’en transport aérien (AMC1 CAT.OP.MPA.150(b)(a)(5)(ii) for aeroplanes with turbine engines, fuel to fly for 30 minutes at holding speed at 1 500 ft (450 m) above aerodrome elevation in standard conditions, calculated with the estimated mass.) la réserve finale est de 30 minutes seulement, mais à 1500ft au dessus de l’aérodrome.
Par exemple pour un Cessna Mustang à la masse de 7500Lbs en conditions ISA, la consommation horaire est de
– à 1500ft AMSL, en régime d’attente 564 Lb/Hr, soit 282 Lbs pour 30mn ;
– au FL 350 en régime économique(le manuel indique que l’altitude de croisière typique est de FL 350-390) 488 Lb/Hr, soit 366 Lbs pour 45mn.
L’exploitation privée en part NCC demande ainsi une réserve finale plus importante qu’en transport aérien part CAT.
3 Météo
3.1.1 Un dégagement au départ, situé à moins d’une heure at the single-engine cruise speed in still air standard conditions est obligatoire en part NCC si pour une raison de météo ou autre il n’est pas possible de revenir se poser (NCC.OP.150). Le dégagement au départ n’est jamais obligatoire en part NCO.
3.1.2 Un dégagement à l’arrivée est obligatoire (NCO.OP.140 + NCC.OP.151) sauf si la destination permet une approche et un atterrissage en VMC à l’heure d’arrivée prévue +/- 1h. Une autre dispense de dégagement est prévue en cas d’aérodrome isolé, je n’entre pas dans le détail ici.
La météo prévue au dégagement doit permettre une approche et un atterrissage à l’heure où on prévoit d’y arriver.
3.2 Météo à la préparation et en route (NCO.OP.160 +NCC.OP.180):
On ne doit pas commencer ni continuer le vol si on n’a pas en permanence un aérodrome (à destination ou de dégagement) dont la météo prévue à l’heure où on a prévu d’y arriver permet l’atterrissage avec les moyens de navigation qu’on a disposition.
4 Aide à l’atterrissage
Le pilote commandant de bord veille à ce que des moyens suffisants soient disponibles pour permettre la navigation et l’atterrissage sur l’aérodrome de destination ou tout aérodrome de dégagement à destination en cas de perte de capacités pour l’opération d’approche et d’atterrissage prévue. (NCO.OP.142 +NCC.OP.153)
Cela implique qu’on doit avoir une solution, à destination ou au dégagement, ne reposant pas sur le GPS au cas où le système GNSS ne fonctionne plus (GM1 NCO.OP.142 + AMC1 NCC.OP.153 & GM1 NCC.OP.153).
Si le guidage vertical PBN cesse de fonctionner au dessus de 1000 ft AGL, on peut continuer une approche PBN en LNAV si le système de navigation le permet (AMC6 NCO.OP.116 + AMC6 NCC.OP.116)
5 Minimums
5.1 détermination
On peut utiliser les cartes Jeppesen pour déterminer les minimums (GM1 NCO.OP.110 + AMC1 NCC.OP.110 )
5.2 Décollage
Le tableau de conversion Visibilité/RVR ne doit pas être utilisé pour le décollage (GM5 NCO.OP.110 + AMC8 NCC.OP.110).
Lorsque
-la visibilité annoncée est inférieure au minimum requis pour le décollage et que la RVR n’est pas disponible, ou que
– ni visibilité ni RVR ne sont disponibles,
le commandant de bord ne doit décoller que s’il peut s’assurer que la visibilité sur la trajectoire de décollage est supérieure au minimum requis (AMC1 NCO.OP.110 +AMC3 NCC.OP.110).
5.3 Atterrissage
En monopilote, la RVR minimum permise est de 800m. Pour une approche Cat 1, une RVR inférieure est permise s’il y a un pilote automatique couplé à l’ILS (GM4 NCO.OP.110 + AMC6 NCC.OP.110).
Le tableau de conversion Visibilité/RVR peut être utilisé si la RVR n’est pas disponible, à condition que la RVR requise soit supérieure ou égale à 800m.(GM5 NCO.OP.110 + AMC5 NCC.OP.110).
Ce tableau reproduit ci-dessous donne un facteur de conversion. Par exemple, lors d’une approche de nuit, si la carte Jeppesen indique que la piste est équipée d’High intensity (HI) approach and runway lights et qu’aucun NOTAM n’indique une panne, alors la RVR, si elle n’est pas transmise, peut-être considérée comme étant le double de la visibilité transmise, pour autant que la visibilité transmise soit supérieure ou égale à 400 m.
| Conversion of reported meteorological visibility to RVR/CMV |
RVR/CMV = reported meteorological visibility x |
RVR/CMV = reported meteorological visibility x |
| Lighting elements in operation |
Day |
Night |
| High intensity (HI) approach and runway lights |
1.5 |
2.0 |
| Any type of light installation other than above |
1.0 |
1.5 |
| No lights |
1.0 |
Not applicable |
NCO.OP.210+ NCC.OP.230 Commencement et poursuite de l’approche — avions et hélicoptères
a) Le pilote commandant de bord peut commencer une approche aux instruments quelle que soit la portée visuelle de piste/visibilité (RVR/VIS) transmise.
b) Si la RVR/VIS transmise est inférieure au minimum, l’approche n’est pas poursuivie:
1) en dessous de 1 000 ft au-dessus de l’aérodrome; ou
2) dans le segment d’approche finale, dans le cas où l’altitude/la hauteur de décision (DA/H) ou l’altitude/la hauteur minimale de descente (MDA/H) est supérieure à 1 000 ft au-dessus de l’aérodrome.
c) Lorsqu’il n’y a pas de RVR disponible, des valeurs équivalentes de RVR peuvent être obtenues en convertissant la visibilité transmise.
d) Si, après le passage des 1 000 ft au-dessus de l’aérodrome, la RVR/VIS passe sous le minimum applicable, l’approche peut être poursuivie jusqu’à la DA/H ou la MDA/H.
e)L’approche peut être poursuivie en dessous de la DA/H ou de la MDA/H jusqu’à l’atterrissage complet, pour autant que les repères visuels appropriés pour le type d’opération d’approche et la piste prévue soient acquis à la DA/H ou à la MDA/H et maintenus.
f)La RVR de l’aire de toucher des roues est toujours déterminante.
Je n’ai pas identifié d’autres règles susceptibles de limiter significativement les possibilités opérationnelles. D’une manière générale, par rapport à la part NCO, la part NCC offre un peu moins de souplesse (par exemple pour l’Oxygène) et requière plus de formalisme (par exemple le bilan masse et centrage doit être effectivement établi, alors qu’en part NCO, la masse et le centrage doit être dans les limites, sans qu’un document doive être effectivement réalisé).
Jusqu’au 25 octobre 2017, c’était l’arrêté du 24 juillet 1991 relatif aux conditions d’utilisation des aéronefs civils en aviation générale qui était applicable. Depuis cette date, le champ d’application de cet arrêté de 1991 est restreint aux aéronefs non régis par l’EASA (ULM, construction amateur, etc.).
1Je rappelle qu’un avion complexe au sens de l’EASA est défini à l’article 3 du règlement 216/2008 comme un avion:
-ayant une masse maximale certifiée au décollage supérieure à 5 700 kg, ou
-certifié pour une configuration maximale en sièges passagers supérieure à dix-neuf, ou
-certifié pour être exploité par un équipage de conduite minimal d’au moins deux pilotes, ou
-équipé d’un ou de plusieurs turboréacteurs ou de plus d’un turbopropulseur.
Un avion non complexe est donc un avion qui ne remplit aucun des critères ci-dessus.↩
2Dérogation prévue à l’article 6.8 du règlement (UE) n°965/2012↩




































 ,
,









 ), rayon pour lequel nous
), rayon pour lequel nous  . Notre approximation précédente donnait 0.50, celle d’aujourd’hui 0.60, la vraie valeur est proche de 0.53, nos deux approximations sont satisfaisantes pour l’usage que nous en ferons.
. Notre approximation précédente donnait 0.50, celle d’aujourd’hui 0.60, la vraie valeur est proche de 0.53, nos deux approximations sont satisfaisantes pour l’usage que nous en ferons.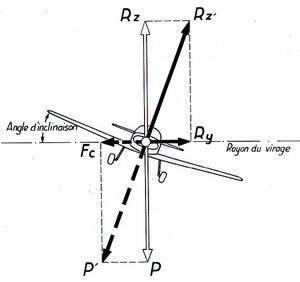
 , R étant le rayon de virage et V la vitesse propre, résultat dont vous trouverez la démonstration dans n’importe quel manuel traitant de cinématique.
, R étant le rayon de virage et V la vitesse propre, résultat dont vous trouverez la démonstration dans n’importe quel manuel traitant de cinématique.
 soit
soit 
 , soit 1NM pour 45° d’inclinaison.
, soit 1NM pour 45° d’inclinaison. , soit un rayon de 1.6 NM pour un virage à 250kt.
, soit un rayon de 1.6 NM pour un virage à 250kt. au lieu de
au lieu de  , et en approchant la parabole
, et en approchant la parabole 
 si l’avion vole à la vitesse propre V.
si l’avion vole à la vitesse propre V. trouvée au paragraphe relatif au rayon de virage, on trouve
trouvée au paragraphe relatif au rayon de virage, on trouve  = 1mn, soit
= 1mn, soit  .
.


 au lieu de
au lieu de  . C’est une approximation très commode pour le calcul mental. L’erreur due à cette approximation ne dépasse un vingtième de mille marin qu’au delà de 165kt et ne dépasse un dixième de mille marin qu’au delà de 330kt.
. C’est une approximation très commode pour le calcul mental. L’erreur due à cette approximation ne dépasse un vingtième de mille marin qu’au delà de 165kt et ne dépasse un dixième de mille marin qu’au delà de 330kt.