
Je souhaite rejoindre l’ILS pour la piste 25, axé sur 250°.
Ma route actuelle, donnée par mon cap corrigé du vent, est 340°.
Actuellement mon ADF m’indique que la route pour rejoindre l’aéroport est au 270°. Je suis donc au sud de l’axe ILS.
Il y a 40 secondes, sur la même route, mon ADF m’indiquait 280°.
Quand dois-je initier mon virage à gauche pour me trouver sur l’axe de l’ILS en sortie de virage?
La première formule que nous allons voir dans cet article permet de déterminer par un calcul mental très simple que je suis à 4 minutes de l’aéroport.
La deuxième formule que nous allons voir permet, aussi par un calcul mental très simple, de déterminer que si j’initie un virage à gauche au taux 1 lorsque mon ADF indiquera que je suis à 5° de l’axe, soit sur un QDM 255°, je serai parfaitement aligné sur l’axe en sortie de virage. Notez que l’aiguille de mon localizer ne commencera à donner une indication précise que lorsque je serai à 2½° de l’axe: si j’attends ce moment pour virer, il sera trop tard pour m’aligner proprement.
Distance à une balise
Si on parcourt α degrés d’un arc de cercle de rayon r centré sur une balise, la distance parcourue est 
On a donc
Divisons les deux membres par la vitesse sol v, est faisons l’approximation habituelle 



On peut donc conclure que si on parcourt α degrés d’un arc de cercle centré sur une balise en t secondes, la durée pour rejoindre la balise est 
Exemple
Je parcours 10° en 30 secondes sur un arc centré sur une balise, il me faut 30/10=3 minutes pour rejoindre la balise.


Anticipations de virage
Cette partie est très importante pour être à l’aise en évolution IFR. Vous devrez faire un petit effort pour bien comprendre, mais vous serez récompensés par une plus grande aisance lors des exercices IFR.
Je souhaite rejoindre une balise radio électrique sur un axe, par exemple un VOR sur l’axe 250°. Mon but sera atteint quand je serai sur une route à 250° qui me conduira à la verticale de la balise.
Je saurai que je suis correctement positionné
1- en voyant l’aiguille de mon VOR centrée avec l’OBS sur 250°,
2-l’affichage TO,
3-et en ayant une route au 250°, c’est à dire un cap qui, corrigé de la dérive, donne une route au 250°.
Il faut les trois conditions, demandez vous pourquoi.
Je rejoins l’axe sous un certain angle appelé angle d’interception i. Par exemple 30° (avec une route au 220° si je viens du nord, ou au 270° si je viens du sud), mais il se peut ce soit davantage, voire au delà de 90°.
Je ne connais pas la distance à la balise, mais mon HSI me donne aussi le QDM de la balise.
Comment savoir à quel QDM je dois commencer à virer vers 250° au taux 1 pour tomber pile sur l’axe? Autrement dit quel est l’angle d’anticipation α défini comme l’écart entre le QDM auquel je commence à virer et l’axe affiché sur l’OBS?
Je suppose que je connais la durée T pour rejoindre la balise (en minutes), par exemple grâce à la méthode exposée plus haut. Si on note d la distance à la balise et r le rayon du virage exécuté pour rejoindre l’axe, on peut poser d sin α = r (1 – cos i), ou encore 


Vous connaissez probablement déjà la formule 


L’intérêt de cette approximation est qu’elle permet de simplifier considérablement la formule (A) qui devient (B)

Poursuivons en approchant la formule 

On arrive alors à la formule suivante, valable pour des angles d’interception supérieurs à 45° et inférieurs à 135°.
(C)

Formules donnant l’angle d’anticipation en fonction de la durée T pour rejoindre la station et de l’angle i d’interception
| Angle d’interception i | (B) Formule approchée  | (C) Formule approchée  | Formule approchée donnée par les manuels |
| 30° |  |  | |
| 45° |  |  | |
| 60° |  | | |
| 75° |  | | |
| 90° |  | | |
| 105° |  | | |
| 120° |  | | |
| 135° |  |  | |
| 150° |  |  | |
| 165° |  |  | |
| 180° | |  | |
On constate que les manuels proposent des formules sérieuses, et que notre formule (C) ne doit pas être utilisée pour des angles d’anticipation inférieurs à 50°, ni supérieurs à 135°, ainsi que nous l’avons annoncé plus haut.
En pratique, dans la vie de tous les jours du pilote, l’angle est assez faible.
On a vu dans l’exemple en tête de cet article qu’il fallait une anticipation à 5° pour un angle d’interception à 90° lorsqu’on est à 4mn de la balise. Pour une interception à 30°, il aurait fallu moins d’un degré d’anticipation, ça parait faible, mais c’est entre 1 et 2 points de localizer, ce n’est donc pas négligeable.
Enfin, notre tableau n’est valable que pour des virages au taux 1! Dès que nous volerons sur des avions plus sérieux que nos avions école, qui voleront si vite qu’ils ne pourront conserver le taux 1, il faudra les abandonner. Si vous virez au taux ½, ce que font parfois les pilotes automatiques lorsque le taux 1 fait dépasser 25° d’inclinaison, il suffit de doubler l’angle d’anticipation, mais si vous virez à un angle d’inclinaison déterminé, par exemple 25° ou 30°, alors il faudra établir une autre formule
 ,
,









 ), rayon pour lequel nous
), rayon pour lequel nous  . Notre approximation précédente donnait 0.50, celle d’aujourd’hui 0.60, la vraie valeur est proche de 0.53, nos deux approximations sont satisfaisantes pour l’usage que nous en ferons.
. Notre approximation précédente donnait 0.50, celle d’aujourd’hui 0.60, la vraie valeur est proche de 0.53, nos deux approximations sont satisfaisantes pour l’usage que nous en ferons.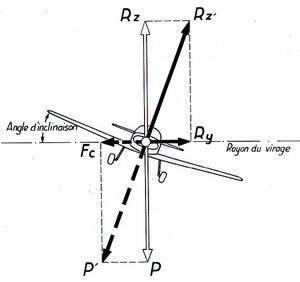
 , R étant le rayon de virage et V la vitesse propre, résultat dont vous trouverez la démonstration dans n’importe quel manuel traitant de cinématique.
, R étant le rayon de virage et V la vitesse propre, résultat dont vous trouverez la démonstration dans n’importe quel manuel traitant de cinématique.
 soit
soit 
 , soit 1NM pour 45° d’inclinaison.
, soit 1NM pour 45° d’inclinaison. , soit un rayon de 1.6 NM pour un virage à 250kt.
, soit un rayon de 1.6 NM pour un virage à 250kt. au lieu de
au lieu de  , et en approchant la parabole
, et en approchant la parabole 
 si l’avion vole à la vitesse propre V.
si l’avion vole à la vitesse propre V. trouvée au paragraphe relatif au rayon de virage, on trouve
trouvée au paragraphe relatif au rayon de virage, on trouve  = 1mn, soit
= 1mn, soit  .
.


 au lieu de
au lieu de  . C’est une approximation très commode pour le calcul mental. L’erreur due à cette approximation ne dépasse un vingtième de mille marin qu’au delà de 165kt et ne dépasse un dixième de mille marin qu’au delà de 330kt.
. C’est une approximation très commode pour le calcul mental. L’erreur due à cette approximation ne dépasse un vingtième de mille marin qu’au delà de 165kt et ne dépasse un dixième de mille marin qu’au delà de 330kt.